2024知到答案 工业机器人(哈尔滨工程大学) 完整智慧树网课章节测试答案
第一章 单元测试
1、单选题:
被誉为现代工业机器人之父的是( )。
选项:
A:加藤一郎
B:阿西莫夫
C:维纳
D:德沃尔
答案: 【德沃尔】
2、单选题:
被誉为仿人机器人之父的是( )。
选项:
A:阿西莫夫
B:德沃尔
C:维纳
D:加藤一郎
答案: 【加藤一郎】
3、单选题:
机器人robot一词最早出现于下面哪部作品( )。
选项:
A:《未来夏娃》
B:《罗萨姆的机器人万能公司》
C:《控制论》
D:《信息论》
答案: 【《罗萨姆的机器人万能公司》】
4、判断题:
当一个机器人的关节只具有张开或者加紧的动作时,可认为该关节具有0.5个自由度。( )
选项:
A:对
B:错
答案: 【对】
5、单选题:
人体具有五大组成部分,分别是五官、心脏、脑、骨骼、四肢,与之对应,机器人也应该具有五大组成部分,按顺序依次是( )。
选项:
A:控制系统、检测装置、机械本体、驱动器、执行机构
B:驱动器、控制系统、检测装置、机械本体、执行机构
C:检测装置、驱动器、控制系统、机械本体、执行机构
D:机械本体、驱动器、控制系统、检测装置、执行机构
答案: 【检测装置、驱动器、控制系统、机械本体、执行机构】
第二章 单元测试
1、单选题:
一矢量 绕
绕 旋转
旋转 度,然后绕
度,然后绕 旋转
旋转 度,求按上述顺序旋转后得到的旋转矩阵为( )。
度,求按上述顺序旋转后得到的旋转矩阵为( )。
选项:
A: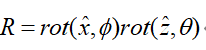
B:
C: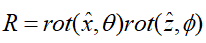
D: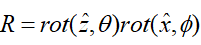
答案: 【
】
2、单选题:
一矢量 绕
绕 旋转30度,然后绕
旋转30度,然后绕 旋转45度,求按上述顺序旋转后得到的旋转矩阵( )。
旋转45度,求按上述顺序旋转后得到的旋转矩阵( )。
选项:
A: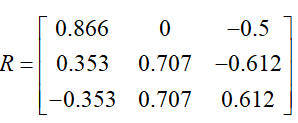
B: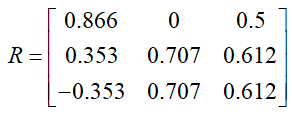
C: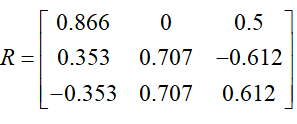
D: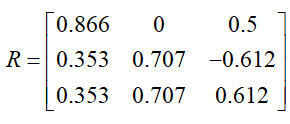
答案: 【
】
3、单选题:
坐标系{B}最初与坐标系{A}重合,将坐标系{B}绕 旋转
旋转 度,接着再将上一步旋转得到的坐标系绕
度,接着再将上一步旋转得到的坐标系绕 旋转
旋转 度,求从
度,求从 到
到 矢量变换的旋转矩阵为( )。
矢量变换的旋转矩阵为( )。
选项:
A:
B:
C:
D:
答案: 【
】
4、单选题:
坐标系{B}最初与坐标系{A}重合,将坐标系{B}绕 旋转30度,接着再将上一步旋转得到的坐标系绕
旋转30度,接着再将上一步旋转得到的坐标系绕 旋转45度,求从
旋转45度,求从 到
到 矢量变换的旋转矩阵( )。
矢量变换的旋转矩阵( )。
选项:
A: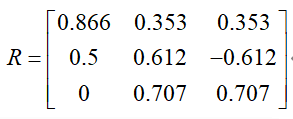
B: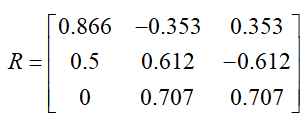
C: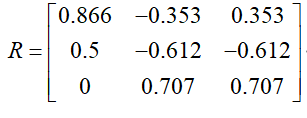
D: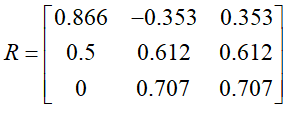
答案: 【
】
5、单选题:
两个有限旋转矩阵可以交换的条件是( )。
选项:
A:当这两个旋转的旋转角度小于等于90°时
B:当这两个旋转是绕着同一个坐标轴转动时
C:任何条件下都不可交换
D:当这两个旋转所绕的坐标轴是互相正交时
答案: 【当这两个旋转是绕着同一个坐标轴转动时】
6、单选题:
已知一速度矢量为 ,又已知
,又已知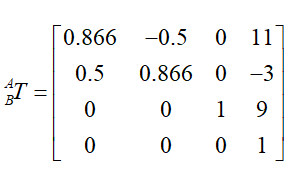 ,下列计算
,下列计算 不正确的是( )。
不正确的是( )。
选项:
A:
B:
C:
D:
答案: 【
】
7、单选题:
关于旋转矩阵和齐次矩阵,下列不正确的是( )。
选项:
A:旋转矩阵的逆矩阵等于该矩阵的转置
B:齐次矩阵的行列式可能不等于1
C:旋转矩阵的行列式可能不等于1
D:齐次矩阵的逆矩阵等于该矩阵的转置
答案: 【旋转矩阵的行列式可能不等于1】
8、单选题:
关于齐次矩阵 ,下列表述不正确的是( )。
,下列表述不正确的是( )。
选项:
A:
B:
C:
D:
答案: 【
】
9、单选题:
已知坐标系{B}相对于坐标系{A}的齐次变换阵。已知 ,求
,求 ,下列说法正确的是( )。
,下列说法正确的是( )。
选项:
A:
B:
C:
D:
答案: 【
】
10、单选题:
圆柱坐标系的三个坐标参数定义见下图,坐标 给定xy面内的有向线段,r表示沿着这个方向的径向长度,z给定了在xy平面上的高度,由圆柱坐标系,r和z来计算笛卡尔坐标系中的一个点
给定xy面内的有向线段,r表示沿着这个方向的径向长度,z给定了在xy平面上的高度,由圆柱坐标系,r和z来计算笛卡尔坐标系中的一个点 结果正确的是( )。
结果正确的是( )。

选项:
A:

B:

C:

D:

答案: 【
】