MOOC 机械原理(河南科技大学)1001795006 最新慕课完整章节测试答案
第一章 绪论
第一章 测试题
1、单选题:
机械原理研究的对象是机器和_____。
选项:
A: 机构
B: 构件
C: 零件
D: 机器
答案: 【 机构】
2、单选题:
机器是由机构组成的,机器与机构的区别是_____。
选项:
A: 机器不作功
B: 机构不作功
C: 机器不运动
D: 机构不运动
答案: 【 机构不作功】
3、单选题:
机械原理课程的培养目标是进行机械产品的_____。
选项:
A: 运动方案设计
B: 重量设计
C: 结构设计
D: 检测方案设计
答案: 【 运动方案设计】
4、单选题:
构件是机器的 单元,零件是机器的 单元 。
选项:
A: 运动;制造
B: 工作;运动
C: 工作;制造
D: 制造;运动
答案: 【 运动;制造】
5、单选题:
从运动的角度看,机构的主要功用在于传递运动或 。
选项:
A: 转换运动的形式
B: 做功
C: 转换能量的形式
D: 改变力的形式
答案: 【 转换运动的形式】
6、判断题:
一个构件可以包含一个零件,也可以包含几个零件。
选项:
A: 正确
B: 错误
答案: 【 正确】
7、判断题:
机器由机构组成,一部机器可能包含不同的机构。
选项:
A: 正确
B: 错误
答案: 【 正确】
8、判断题:
机械原理研究的内容有机构的结构分析、运动分析、受力分析;常用机构的原理及设计;机械系统运动方案设计等。
选项:
A: 正确
B: 错误
答案: 【 正确】
第二章 机构的结构分析
第二章 测试题
1、单选题:
机构中的构件是由一个或多个零件所组成,这些零件间 产生任何相对运动。
选项:
A: 可以
B: 不能
C: 不一定
D: 可能
答案: 【 不能】
2、单选题:
在机构中原动件数目 机构自由度时,该机构具有确定的运动。
选项:
A: 大于
B: 小于
C: 等于
D: 不确定
答案: 【 等于】
3、单选题:
高副低代中的虚拟构件及其运动副的自由度应为 。
选项:
A: -1
B: +1
C: 0
D: 2
答案: 【 -1】
4、单选题:
轴2搁置在V形铁1上,根据它们在图示平面内能实现的相对运动,可判别它们之间组成的运动副是 。


选项:
A: 转动副
B: 移动副
C: 纯滚动型平面高副
D: 滚动兼滑动型平面高副
答案: 【 转动副】
5、单选题:
在下列图中,图 不是杆组,而是二个杆组的组合。
选项:
A: 

B: 
C: 
D: 
答案: 【 】
6、单选题:
下列图中,图 是Ш杆组,其余都是两个Ⅱ级杆组的组合。
选项:
A: 
B: 
C: 
D: 
答案: 【 】
7、单选题:
原动件的自由度应为 。
选项:
A: +1
B: -1
C: 0
D: 2
答案: 【 +1】
8、单选题:
基本杆组的自由度应为 。
选项:
A: 0
B: 1
C: 2
D: 3
答案: 【 0】
9、单选题:
判断机构能否运动的条件是 。
选项:
A: F<0
B: F>0
C: F=0
D: F=从动件数
答案: 【 F>0】
10、单选题:
两个构件直接接触而形成的 ,称为运动副。
选项:
A: 可动连接
B: 连接
C: 接触
D: 无连接
答案: 【 可动连接】
11、单选题:
低副的特点:制造 ,单位面积压力 ,承载能力 。
选项:
A: 容易;小;大
B: 不容易;小;大
C: 不容易;大;小
D: 容易;大;小
答案: 【 容易;小;大】
12、单选题:
两构件构成平面转动副时,则运动副使构件间丧失了 的独立运动。
选项:
A: 两个移动
B: 两个转动
C: 一个移动和一个转动
D: 一个转动和两个移动
答案: 【 两个移动】
13、单选题:
两构件组成平面高副时,则运动副使构件间丧失了 的独立运动。
选项:
A: 一个转动和一个移动
B: 一个转动
C: 一个移动
D: 一个转动和两个移动
答案: 【 一个移动】
14、单选题:
两个构件在多处接触构成转动副,在各配合处两构件相对转动轴线 时,按一个转动副计算。
选项:
A: 重合
B: 垂直
C: 交叉
D: 平行但不重合
答案: 【 重合】
15、多选题:
下列运动中构成低副的有 。
选项:
A: 暖水杯瓶盖的旋紧或旋开
B: 房门的开关运动
C: 抽屉的拉出和推进运动
D: 火车车轮在铁轨上的滚动
E: 足球在地面的滚动
答案: 【 暖水杯瓶盖的旋紧或旋开;
房门的开关运动;
抽屉的拉出和推进运动】
16、多选题:
两个构件在多处接触构成移动副,各接触处两构件相对移动方向 时,按一个移动副计算。
选项:
A: 重合
B: 平行
C: 交叉
D: 垂直
E: 成锐角
答案: 【 重合;
平行】
17、多选题:
下列图片中,在A点形成复合铰链的有 。

选项:
A: A
B: B
C: C
D: D
E: E
答案: 【 A;
C;
E】
18、判断题:
平面机构高副低代的条件是替代前后机构的自由度、瞬时速度和瞬时加速度保持不变。
选项:
A: 正确
B: 错误
答案: 【 正确】
19、判断题:
任何具有确定运动的机构都是由机架加原动件再加自由度为零的杆组组成的。
选项:
A: 正确
B: 错误
答案: 【 正确】
20、判断题:
平面运动副,其自由度加约束数等于3。
选项:
A: 正确
B: 错误
答案: 【 正确】
21、判断题:
计算机构自由度时,n为构件总数。
选项:
A: 正确
B: 错误
答案: 【 错误】
22、判断题:
机构中,只有一个机架。
选项:
A: 正确
B: 错误
答案: 【 正确】
23、判断题:
与整个机构运动无关的自由度称为虚约束。
选项:
A: 正确
B: 错误
答案: 【 错误】
第三章 平面机构的运动分析
第三章 测试题
1、单选题:
在两构件的相对速度瞬心处,瞬时重合点间的速度应有 。
选项:
A: 两点间相对速度为零,但两点绝对速度不等于零
B: 两点间相对速度不等于零,但其中一点的绝对速度等于零
C: 两点间相对速度不等于零且两点的绝对速度也不等于零
D: 两点间的相对速度和绝对速度都等于零
答案: 【 两点间相对速度为零,但两点绝对速度不等于零】
2、单选题:
在图示连杆机构中,连杆2的运动是 。

选项:
A: 平动
B: 瞬时平动
C: 瞬时绕轴B转动
D: 一般平面运动
答案: 【 平动】
3、单选题:
相对瞬心和绝对瞬心的相同点是在该点两构件 。
选项:
A: 绝对速度等于零
B: 相对速度等于零
C: 绝对速度不等于零
D: 相对速度不等于零
答案: 【 相对速度等于零】
4、单选题:
构件2和构件3组成移动副,则有关系 。

选项:
A: vB2B3=vC2C3, w2=w3
B: vB2B3≠vC2C3, w2=w3
C: vB2B3=vC2C3,w2¹w3
D: vB2B3≠vC2C3,w2¹w3
答案: 【 vB2B3=vC2C3, w2=w3】
5、单选题:
将机构位置图按实际杆长放大一倍绘制,选用的长度比例尺ml应是 。
选项:
A: 0.5mm/mm
B: 2mm/mm
C: 0.2mm/mm
D: 5mm/mm
答案: 【 0.5mm/mm】
6、单选题:
利用相对运动图解法求图示机构中滑块2上D2点的速度 的解题过程的恰当步骤和利用的矢量方程为 。
的解题过程的恰当步骤和利用的矢量方程为 。

选项:
A: vB3=vB2+vB3B2,利用速度影像法△pb2d~△CBD
B: vB3=vB2+vB3B2,△pb2d2~△CBD
C: vD=vB+vDB,式中vDB=lDBw1
D: vB3=vB2+vB3B2,求出vB3后,再利用vD2=vB2+vD2B2
答案: 【 vB3=vB2+vB3B2,求出vB3后,再利用vD2=vB2+vD2B2】
7、单选题:
利用相对运动图解法来求解图示机构中滑块2上D2点的速度,解题过程的恰当步骤和利用的矢量方程可选择 。

选项:
A: vB3=vB2+vB3B2,利用速度影像法△pb2d~△CBD
B: vB3=vB2+vB3B2,△pb2d2~△CBD
C:  ,式中
,式中
D: vC2=vC3+vC2C3=vB2+vC2B2,速度影像△c2b2d2~△CBD
答案: 【 vC2=vC3+vC2C3=vB2+vC2B2,速度影像△c2b2d2~△CBD】
8、单选题:
在速度图中从点p指向点b的矢量pb表示 。
选项:
A: 
B: 
C: 
D: 
答案: 【 】
9、单选题:
在速度图中从点b指向点c的矢量bc表示 。
选项:
A: 
B: 
C:
D: 
答案: 【 】
10、单选题:
根据三心定理,速度瞬心和
的连线与速度瞬心
和
的连线的交点应是速度瞬心 。
选项:
A:
B:
C:
D:
答案: 【 】
11、单选题:
铰链四杆机构共有 个瞬心,其中 个是绝对瞬心, 个是相对瞬心。
选项:
A: 6,;3;3
B: 6;2;4
C: 6;4;2
D: 6;5;1
答案: 【 6,;3;3】
12、单选题:
作连续往复移动的构件,在行程的两端极限位置处,其运动状态必定是 。
选项:
A: v=0,a=0
B: v=0,a=max
C: v=0,a≠0
D: v≠0,a≠0
答案: 【 v=0,a≠0 】
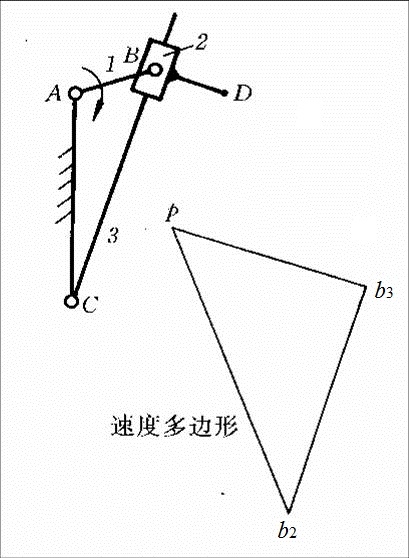
13、单选题:
用速度影像法求下图杆3上与D2点重合的D3点速度时,应使 。
选项:
A: △ABD~△pb2d2
B: △CBD~△pb2d2
C: △CBD~△pb3d3
D: △CBD~△pb2d3
答案: 【 △CBD~△pb3d3】
14、单选题:
如图所示六杆机构,求解的方法和顺序为 。

选项:
A: 
B: 